- The System Role selection dialog got usability improvements
- and we added a CustomStatusItemSelector to the widget library in the process.
- Snapper gained machine-readable output
- Storage:
- remote encrypted devices are activated properly at boot time
- random and pervasive encryption also supported in AutoYaST
- improved support for AutoYaST Guided Partitioning
A More User Friendly Role Selector Dialog
Step by step, we continue improving the user experience making use of the newly added widgets to libyui. This sprint was the turn to update the role selection dialog to use the new item selector introduced during the sprint 87. Apart from looking better as it can be seen in the screenshots below, there are two immediate improvements:
- the vertical scroll, when present, is respected after selecting a role (instead of “jumping to the beginning”), and
- the selected role (if any) will be visible when arriving at the dialog even when the list is quite long or the available space too short.
| Before | After |
 |
 |
What is more, updating the dialog was also useful for us to realize about some needed improvements for the widget itself, mentioned in the next section. Quite a productive change 🙂
When one Bit is not Enough: The CustomStatusItemSelector
A few weeks ago, we wrote about the new ItemSelector widget that is finding its way into YaST user interfaces. It turned out that just a simple on/off status is not enough in some cases, so we had to extend that concept. For example, software modules may have dependencies, and we want to show the difference between one that was explicitly selected by the user and one that was auto-selected because some other software module requires it.
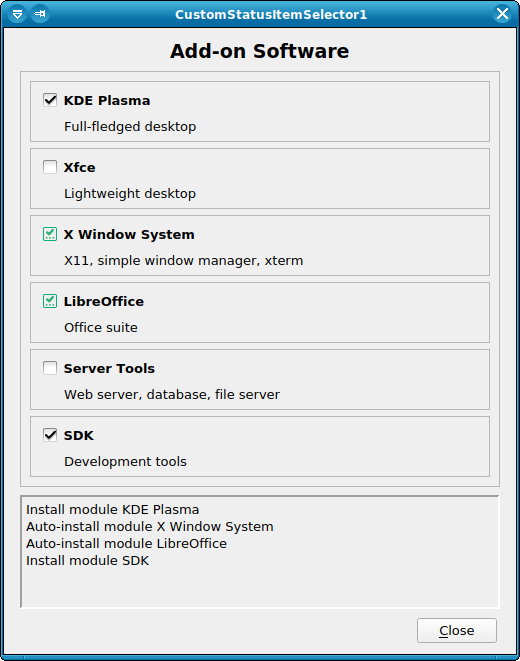
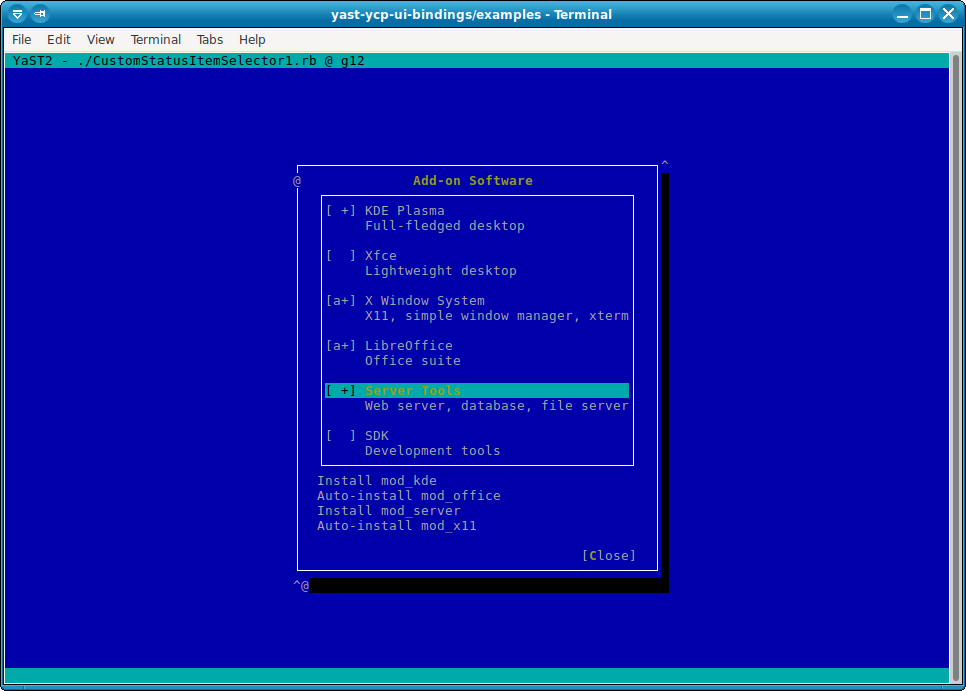
This kind of shook the foundations of the underlying classes; all of a sudden a bit is no longer just a bit, but it needs to be broken down into even smaller pieces. Well, we cheated; we now use integer values instead. Most of the class hierarchy still only uses 0 and 1, but the new YCustomStatusItemSelector also supports using higher numbers for application-defined purposes.
For each possible status value, the application defines the name of the icon to be displayed (for graphical UIs like the Qt UI), the text equivalent (for text mode / the NCurses UI), and an optional nextStatus which tells the widget what status to cycle to when the user changes the status of an item with a mouse click or with the keyboard. A value of -1 lets the application handle this.
So this is not a one-trick-pony that is useful only for that one use case (the software modules), but a generic tool that might find good uses in other places all over YaST as well.
Snapper and Machine-readable Output
Most likely you already know snapper, a great tool to work with your filesystem snapshots. Some third-party scripts and tools (e.g., YaST) use the snapper CLI to get some information, but generally, snapper generates an output intended to be human-readable. Sometimes that could cause some troubles in scripts checking the snapper output. Now on, snapper also offers CLI options to generate its output in a machine-readable format, i.e., CSV and JSON. Please, check this post for more information about those new options.
Fix Boot Problems with Remote Encrypted Devices
Since we adopted systemd, the management during system boot of encrypted devices on top of network-based devices like iSCSI or FCoE disks has been less than optimal. But now we are happy to announce that we have put all the pieces together to make the experience as smooth as possible.
One of the main responsibilities of systemd is sorting the actions performed during boot and setting the dependencies between them. For example, if there are encrypted devices, systemd will first ask you for the password and activate the devices to afterwards mount the file system contained in those encrypted devices. Systemd should be able to distinguish when an encrypted device is based on a network-based storage device and, thus, can only be initialized after the network is up. In some cases that detection failed (for example network block device based mounts, such as iSCSI and FCoE disks) and systemd got stuck before initializing the network waiting for the device to be available.
Recently, SLE and openSUSE Leap has incorporated support for specifying the _netdev option in the /etc/crypttab file. With such option, systemd will recognize the encrypted device as network-based and will only try to activate it after setting up the network. That’s analogous to the corresponding _netdev option in /etc/fstab that has been already there for quite some time and that can be used to defer when a device is mounted. For it to work properly, the _netdev option must be present in all the relevant entries of both crypttab and fstab.
And that’s exactly what YaST will do now in openSUSE Tumbleweed and upcoming releases of both SLE and openSUSE Leap. From now on, the _netdev option will be added fstab for all mount points depending (directly or indirectly) on the network. In addition, that option (and also the noauto and nofail ones) will be propagated from fstab to all the corresponding crypttab entries.
This should mark the end of a dark age of encrypted iSCSI and FCoE devices timing out during boot.
AutoYaST Support for Random and Pervasive Encryption
Back in October, we announced that YaST got support for new encryption methods like random or pervasive encryption. At that time, AutoYaST was out of scope because we wanted to have a stable (and tested) API first. Fortunately, the time has come and now AutoYaST supports these encryption mechanisms.
Starting in autoyast2 4.2.17, you can specify the encryption method using a crypt_method element, as shown in the example below. Possible values are luks1 (regular LUKS1 encryption), pervasive_luks2 (pervasive volume encryption), protected_swap (encryption with volatile protected key), secure_swap (encryption with volatile secure key) and random_swap (encryption with volatile random key).
<drive>
<type config:type="symbol">CT_DISK</type>
<use>all</use>
<partitions config:type="list">
<partition>
<size>20G</size>
<mount>/</mount>
<filesystem config:type="symbol">ext4</filesystem>
<crypt_method config:type="symbol">luks1</crypt_method> <!-- default method if crypt_key is defined -->
<crypt_key>S3CR3T</crypt_key>
</partition>
<partition>
<size>1G</size>
<mount>swap</mount>
<crypt_method config:type="symbol">random_swap</crypt_method> <!-- set encryption method -->
</partition>
</partitions>
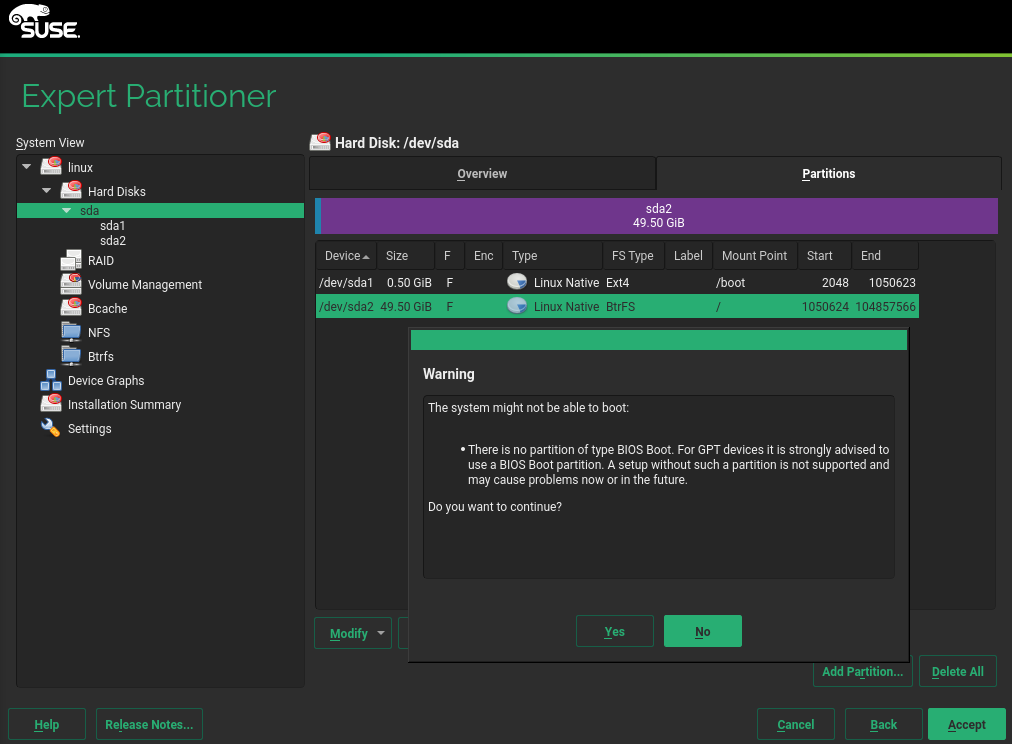
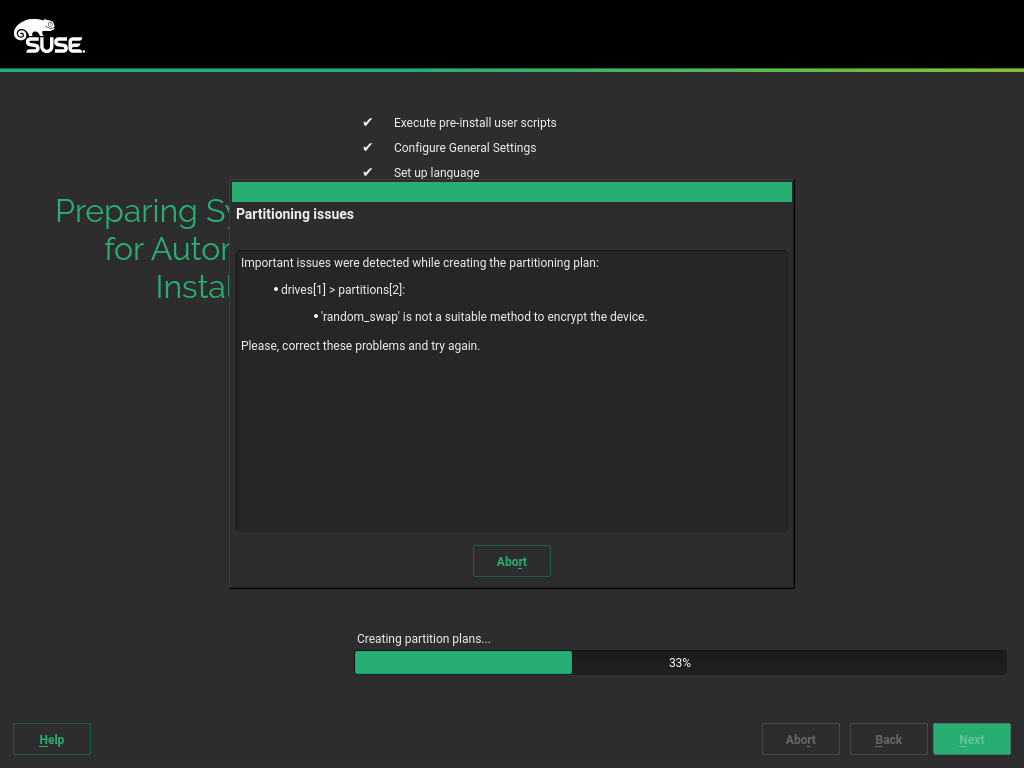
</drive>As we want AutoYaST to be as user-friendly as possible, it will try to help you if you do some mistake setting the encryption configuration as when in the screenshot below.
Finally, the old crypt_fs element is deprecated, although it stills works for backward-compatibility reasons. Basically, it is equivalent to setting crypt_method to luks1.
Improve Support for AutoYaST Guided Partitioning
When it comes to partitioning, we can categorize AutoYaST use cases into three different levels:
- Automatic partitioning: the user does not care about the partitioning and trusts in AutoYaST to do the right thing.
- Guided partitioning: the user would like to set some basic settings (use LVM, set an encryption password, etc.)
- Expert partitioning: the user specifies how the layout should look, although a complete definition is not required.
To some extent, it is like using the regular installer where you can skip the partitioning screen and trust in YaST, use the Guided Proposal, or define the partitioning layout through the Expert Partitioner.
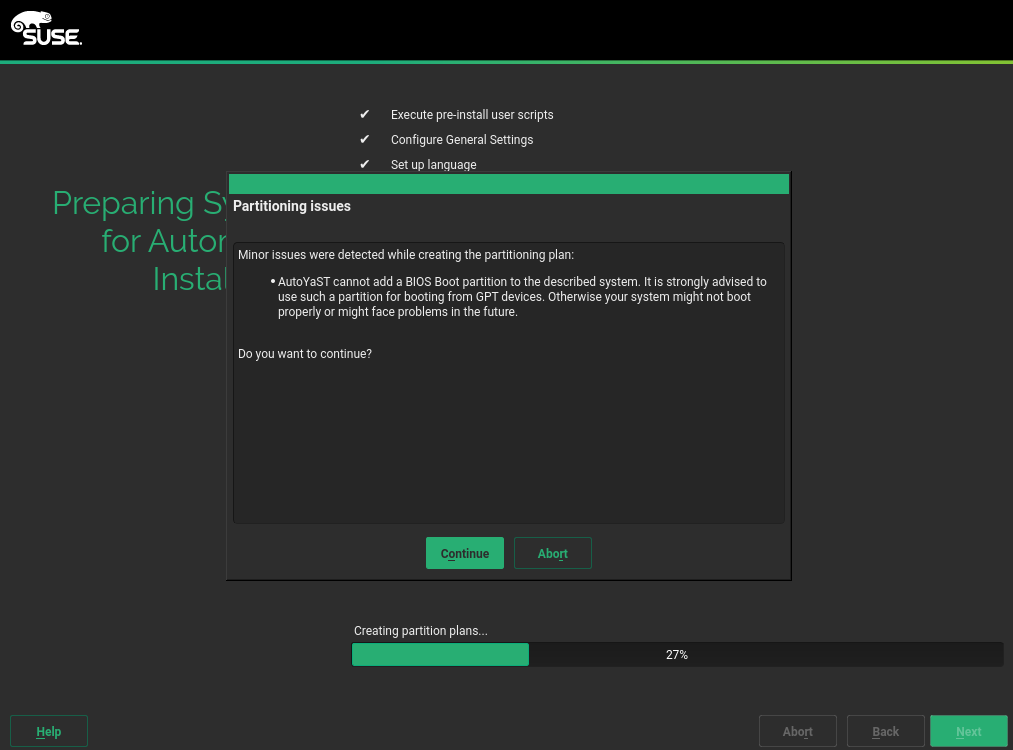
The second level (Guided partitioning) was introduced in AutoYaST with the release of SUSE Linux Enteprise 15 (and Leap 15.0) but it was not documented at all. Additionally, although it was working as designed at first sight, it was far from being that useful.
This sprint with invested quite some time improving the documentation (kudos to our awesome documentation team) and the behaviour. Now, if you want to set up an LVM system without having the specify all the details, you can use the following snippet in your profile:
If you are interested in the available options, you can check the documentation draft.